- 2.2 Optik - Mekanik Fareler
FARENİN ÇEŞİTLERİ
A. Optik-Mekanik Fareler
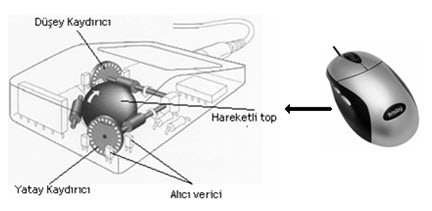
- 1972 yılında Bill English toplu fareyi icat etmiştir. Bu icat ile farenin içinde bulunan top, farenin dış yüzeyinde bulunan yön tekerleklerinin işlevini üstlenmiştir. İç yapısını incelersek; farenin içinde bulunan ve topun dönmesiyle hareket eden birbirine dik 2 eksen bulunur.
- Farenin X ve Y düzlemindeki hareketi bu çubuklara aktarılır. Çubuklar bağlı oldukları delikli diskleri döndürürler. Bu disklerin her iki tarafında da 2’şer adet olmak üzere tarafında kızılötesi ışın yayan ledler ve bu ledlerin ışığını algılayan sensörler bulunur. 4 adet led bulunması dönme yönünün tam olarak algılanmasında kullanılır.
- Delikli diskler dönünce kızılötesi ışın karşı taraftaki sensörlere kesik kesik ulaşır. Farenin içinde bulunan çip, yada bir nevi küçük bir işlemci, sayesinde bu kesilmeler ikilik sisteme çevrilerek işleme alınır ve kablo aracılığıyla bilgisayara gönderilir. Kesilmelerin frekansı farenin hızını belirlerken, miktarı da ekranda ne kadar yer değiştirmesi gerektiğini belirlemede kullanılır.
B.Optik Fareler
- Agilent Teknoloji tarafından 1999 yılının sonlarına doğru üretilen optik fareler, mekanik farelerden farklı olarak ışık emen ve algılayan diyotlar(Led-Light emitting diode) kullanırlar. Optik farelerin birçok çeşidi vardır.
- Bunlardan ikisi ledli optik ve lazerli optiktir. Ledli optik fareler gezdiği yüzeyi led ile aydınlatır. Bu fareler optik-elektronik algılayıcılar kullanarak bulunduğu yüzeyin art arda fotoğrafını çeker. Gezilen çerçeveden bir yandaki çerçeveye geçilince bu hareketi algılar ve değişen görüntüyü optik akım tahmini teorisine göre (optical flow estimation) eksen hareketine çevirir. Bu sebeple optik fareler birçok yüzeyde “Mousepad”ın kullanımına ihtiyaç duymadan hareket eder.
- Örnek vermek gerekirse; Avago Teknoloji’nin ürettiği ADNS-2610 optik faresi saniyede her biri 18* 18 piksel boyutlu ve 64 farklı gri tonunu birbirinden ayırabilen 1512 fotoğraf çekerek, bunları içinde bulunan özel chip aracılığıyla işler.

- Lazerli fareler ise ledli farelerden farklı olarak bulunduğu yüzeyi lazer ile aydınlatır. İlk defa 1998 yılında Sun Mikrosistemleri tarafından lazerli fareler 2004 yılında piyasaya sunulmuştur.
- Bu fareler normal optik farelere göre bulunduğu yüzeyi 20 kat daha hızlı ve çok daha yüksek çözünürlükte algılama özelliğine sahiptir. Ledli farelere kıyasla en önemli avantajı ise çok daha az enerjiyle çalışabilmesidir.
- Optik farelerin algılama kalitesi birçok faktör göz önüne alınarak ölçülür. Bunlardan en önemlisi de çözünürlüktür.
- Çözünürlük ne kadar yüksekse, fare, çekilen resimlerle o kadar iyi işlem yapar ve imlecin hareketini bir o kadar hızlı kontrol eder.
- Birçok fare 400-800 dpi (dots per inch-inç başına düşen nokta) çözünürlüğe sahiptir. Ancak bilgisayar oyunları için özel tasarlanan fareler 1600 dpi ye kadar çıkabilmektedir. Bu farelerde ihtiyaç olmayan durumlarda çözünürlüğü düşürme seçeneği de vardır.
- Algının kalitesini etkileyen diğer faktörler de optik sensörün boyutları, resim çekme hızı resim işleme hızı ve maksimum hareket hızıdır.
- Çekilen resimleri boyutları ne kadar büyükse, ne kadar hızlı fotoğraf çekilip işlenirse ve fare kesinliği kaybetmeden ne kadar hızlı hareket edebilirse o kadar iyi performans sergiler.
- Optik farelerin bir kötü yanı şeffaf yüzeyleri algılamamaları ve böyle yüzeylerde imlecin kontrolünü kaybetmeleridir. Bazı lazerli fareler bu sorunu aşabilse de bu teknoloji kullanıcıya pahalıya gelmektedir.
- Optik fareler genel olarak mekanik farelerden daha çok enerjiye ihtiyaç duymaktadır. Masaüstü bilgisayarlarda bu durum sorun oluşturmasa da, kablosuz farelerde enerjinin çabuk tükenmesine ve fareye yeniden kablo takılıp şarj edilmesine sebep olmaktadır.

Hiç yorum yok:
Yorum Gönder